

 Leichte Sprache
Leichte SpracheSupervised Autonomous Interaction in Unknown Territories (SAINT)
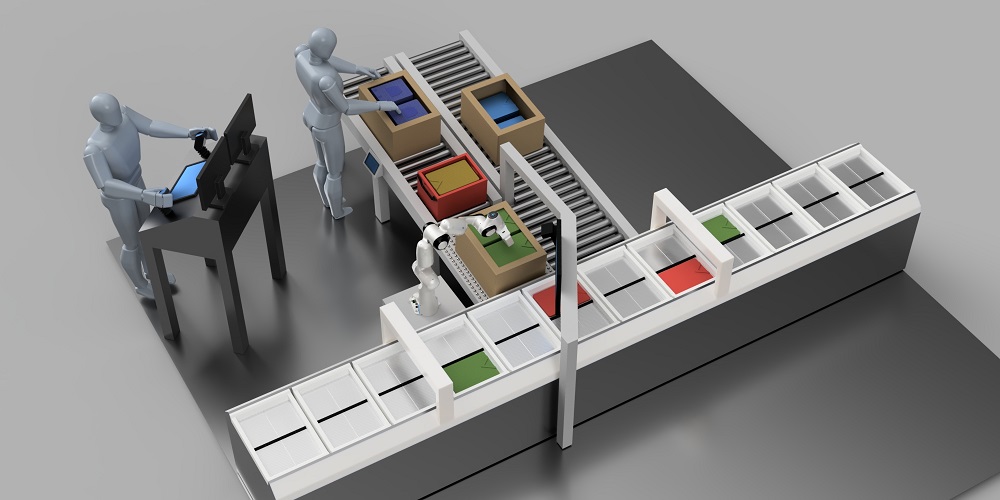

links: Ein Roboter greift verpackte Kleidungsstücke aus einer Box und legt sie auf einem Laufband ab (Quelle: Technische Universität München, Department of Mechanical Engineering) rechts: Aufbau des finalen Demonstrators in einer Logistikhalle (Quelle: Technische Universität München, Department of Mechanical Engineering)
Bestehende Bin Picking Anwendungen sind meist auf einen vorab definierten Anwendungsfall optimiert. Unbekannte Parameter, welche sich zwischen den Zyklen ändern, wie die Form der zu handhabenden Objekte, können oft nicht berücksichtigt werden oder führen zu hohen Fehlerraten des Gesamtsystems.
Aus diesem Grund war das Ziel des Projekts die Entwicklung eines semi-automen Gesamtsystems. Dabei sollte der Autonomiegrad des Gesamtsystems an seinen Zustand angepasst werden: Fehlerfälle, wie nicht gegriffene Objekte, werden zunächst autonom behoben. Bei nicht auflösbaren Fehlersituationen soll ein menschlicher Operator mittels semi-autonomer oder teleoperativer Interaktion unterstützen können. Vorbereitend für weitere zukünftige Einsatzszenarien mit Mensch-Roboter-Interaktion, wie dem Collaborative Packing, sollten zudem neuartige Algorithmen zur autonomen Bewegungsplanung des Robotersystems entwickelt werden.
Zu Beginn erfolgte eine genaue Definition des zu betrachtenden Anwendungsfalls, bei dem verpackte Kleidung aus Boxen gegriffen werden sollte sowie eine Anforderungsanalyse. Im Anschluss wurden die Schnittstellen zwischen den Software-Modulen implementiert und die einzelnen Funktionalitäten der Ablaufsteuerung, der Bewegungsplanung und der Bildverarbeitung ausgearbeitet. Den Abschluss des Projekts markierte die erfolgreiche Evaluation des Gesamtsystems bei einem Industriepartner.
Im Projekt wurde ein effizientes und preiswertes Robotergreifsystem mit integrierter taktiler und optischer Sensorik entwickelt, welches Greifvorgänge von flexiblen Objekten ermöglicht. Die integrierte Bilderverarbeitung basierend auf KI-Methoden erlaubt eine signifikante Steigerung der Greiferfolgswahrscheinlichkeit. Die autonome Bahnplanung ermöglichte eine schnelle Adaption des Systems auf andere Arbeitsplätze und eine sichere Bewegung des Manipulators in mit Menschen geteilten Arbeitsräumen. Die Robustheit des Bin Picking Systems wurde durch die Entwicklung eines teilautonomen Fehlerbehandlungsalgorithmus kombiniert mit teleoperierter Überwachung sichergestellt. Mittels der entwickelten intuitiven Mensch-Maschine-Schnittstelle konnte ungeschultes Personal in Nutzerstudien Fehlersituationen erfolgreich beheben.
