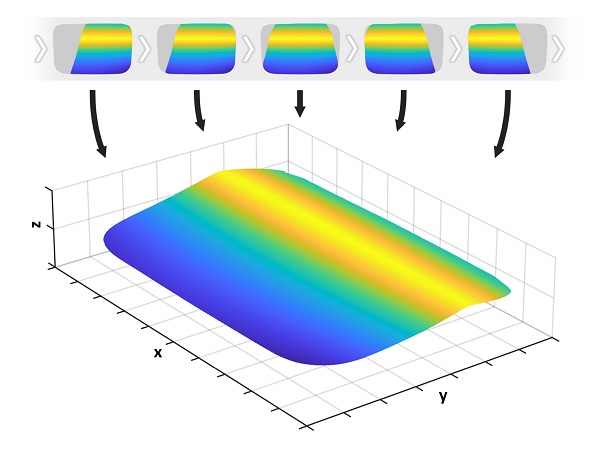
Das Messergebnis wird während der Bewegung des Objekts aus mehreren
überlagerten Ansichten zusammengesetzt (Quelle: Micro-Epsilon Messtechnik GmbH
& Co. KG)
Das Messergebnis wird während der Bewegung des Objekts aus mehreren
überlagerten Ansichten zusammengesetzt (Quelle: Micro-Epsilon Messtechnik GmbH
& Co. KG)