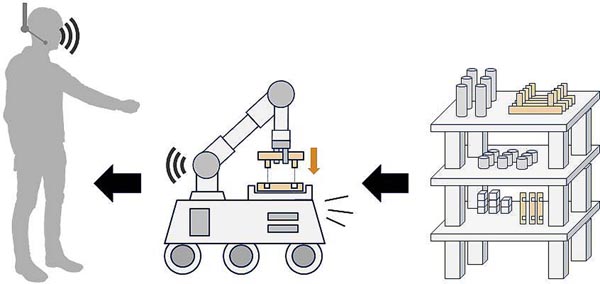
Automatisierte Kommissionierung von Bauteilen und Vormontage während der Fahrt
durch ein mobiles Robotersystem. Die Übergabe der vormontierten Baugruppe an
den Werker wird durch Strategien der Mensch-Roboter-Kooperation realisiert.
(Quelle: Forschungsverbund FORobotics, iwb)