

 Leichte Sprache
Leichte SpracheDeepMIC – Deep Learning basierte Endoskopnachführung
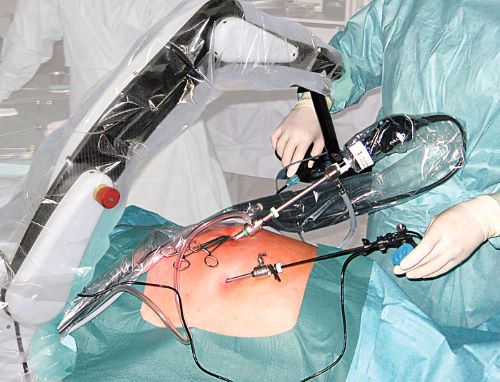
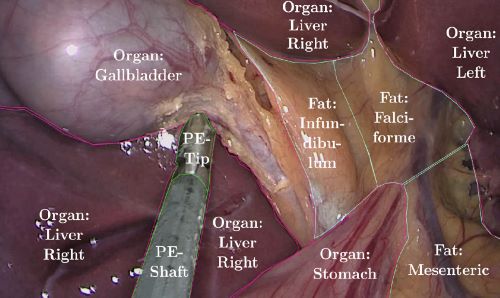
links: Minimalinvasive Operation mit Assistenzsystem (Quelle: AKTORmed GmbH,Tobias Rückert, OTH Regensburg) rechts: Chirurgische Szene mit Strukturen und Instrument (Quelle: AKTORmed GmbH,Tobias Rückert, OTH Regensburg)
Die exakte, verzögerungsfreie Kameraführung stellt bei minimalinvasiven Eingriffen (MIC) einen besonders kritischen Punkt dar, da die präzise Sichtfeldeinstellung zu jedem Zeitpunkt des Eingriffs eine entscheidende Voraussetzung für ein adäquates Handeln des Operateurs ist – und somit auch für den Erfolg des Eingriffs.
Diese Aufgabe wird bisher in der Regel durch einen menschlichen Assistenten übernommen. Dadurch ergibt sich in der Praxis eine Reihe von Problemen:
» fehlende Hand-Auge-Koordination
» Missverständnisse in der Einstellung des Bildausschnitts
» instabiles Bild (unruhige Kameraführung, Horizontverkippung)
» Fachkräftemangel
Seit Ende der 1990er Jahre wird versucht, diesen Problemen mit mechatronischen Assistenzsystemen entgegen-zu wirken. Jedoch konnte bisher noch kein System breite Akzeptanz finden. Dafür sind vor allem zwei Gründe maßgeblich: Die Arbeitsbelastung der Operateure wird durch das Assistenzsystem erhöht und die Schnittstellenlösung zwischen Kameraführungssystem und Operateur ist immer noch unbefriedigend.
Das Projekt DeepMIC schafft einen neuen Ansatz für ein intelligentes, kollaboratives Assistenzsystem zur Kameraführung bei MIC. Es soll über die Fähigkeit zur aktiven (halb-)automatischen Kooperation mit dem Chirurgen verfügen und somit quasi selbstständig zu einer bestmöglichen Kameraführung fähig sein. Der Ansatz besteht in einer kontinuierlichen Auswertung des endoskopischen Kamerabildes durch Methoden der künstlichen Intelligenz (hier speziell Deep Learning) in Kombination mit natürlicher Spracherkennung. Kombiniert mit Wissen aus dem chirurgischen Workflow soll das System eine Interaktion mit dem Chirurgen erlauben, die einer menschlichen Assistenz ähnlich ist.
