

 Leichte Sprache
Leichte SpracheBildgestützte robotische Mikrochirurgie in der Ophthalmologie – BiRoMicO
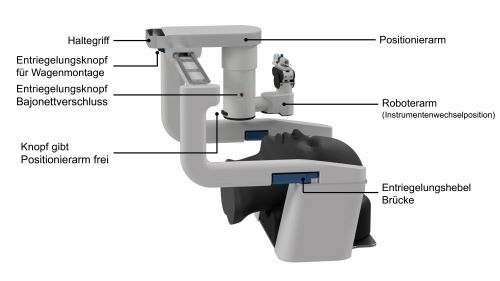
Aufbau des Roboters für die Augenchirurgie, entworfen und als Forschungsdemonstrator vom Forschungslabor der Augenklinik am Klinikum rechts der Isar der Technischen Universität München entwickelt (Quelle: Klinik und Poliklinik für Augenheilkunde am Klinikum rechts der Isar, M. Ali Nasseri, Mario Weisser)
Die Ophthalmochirurgie beschäftigt sich im Operationsfeld meist mit chirurgischen Maßnahmen im Mikrometerbereich, sodass seitens der Operateure eine extrem hohe Präzision und Geschicklichkeit nötig ist. Ein limitierender Faktor ist der physiologische Tremor, der sich im Bereich von 100 bis 200 µm bewegt und der auf die feinen Instrumente übertragen wird.
Neue Therapieverfahren setzen jedoch eine enorm hohe Präzision voraus. Zum Beispiel ist die Behandlung der altersabhängigen Makuladegeneration (AMD) mittels Stammzelltherapie oder Gentherapie eine hochmoderne Zukunftstherapie. Die subretinale Injektion der Stammzellen muss in einem Bereich erfolgen, der nur wenige Mikrometer umfasst. Das sichere Ansteuern dieses schmalen Injektionsbereiches stellt besondere Anforderungen an die Bildgebung, aber auch an die Instrumentenführung.
Um die technischen Rahmenbedingungen für diese Behandlungen bereit zu stellen, wird in dem Projekt ein volldigitales 3D-Operationsmikroskop mit integrierter simultaner Kohärenztomographie für die Ophthalmologie entwickelt. Dies wird umgesetzt durch bahnbrechende Forschungen in den Bereichen Robotik und künstliche Intelligenz (KI) am Medical Autonomy and Precision Labor (MAPS) der Augenklinik des Klinikums rechts der Isar. In die multimodale Bildgebung des Mikroskops wird parallel ein robotischer Mikromanipulator integriert, der über die 3D-Bildgebungsinformation exakt und intuitiv gesteuert werden kann. Zudem können durch den volldigitalen Ansatz Bild und Positionsinformationen aller Systemkomponenten abgeglichen und dokumentiert werden. Das Projekt soll ermöglichen, dass Operationen, die bislang nur schwer durchführbar waren, erfolgreich absolviert werden können – bildgesteuert und mit hoher Präzision.
